在国家自然基金委员会"共融机器人基础理论与关键技术研究"重大研究计划重点项目(批准号:91848201)的资助下,北京大学工学院段慧玲教授团队在微纳米机器人设计、制备及仿生界面功能化研究方面取得一系列重要进展,相关结果近期分别发表于《Science Advances》、《Materials Today》、《Proceedings of the National Academy of Sciences of the United States of America》和《Advanced Intelligent Systems》等国际知名期刊。
具有体积小、靶向精准、损伤低、可控等诸多优点的微纳米机器人被誉为未来对抗人体疾病最理想的武器之一,在生物医学等领域的应用前景广阔。目前微纳米机器人的研究与应用主要集中于对微纳米结构的运动控制及各类微操作,其功能表达受到材料、结构设计、运动控制等因素限制,不具备对外界环境的感知与自适应能力,在生物体等复杂微环境中的应用受到极大限制。具有环境刺激响应的微纳米机器人,不仅环境适应性强,还具备运动阻力小、操控柔顺等独特优势,在生物医学等领域具有广阔的应用前景。近期,北京大学段慧玲教授研究团队基于4D打印技术,研发了一系列刺激响应智能材料,借助结构功能化设计理念设计制备了具有复杂可控变形功能的智能微结构、优异运动特性的微纳米机器人,以及性能卓越的功能仿生表面。
智能材料研发
在智能软材料方面,该团队研发出可进行双光子聚合的刺激响应水凝胶,并基于激光直写技术成功实现了微纳4D打印,第一次真正制造出在不同pH值、温度、溶剂等刺激下从三维到三维快速转换功能形态的智能变体结构,可用于自扩张微血管支架 (Stent)、智能药物释放载具 (Cage)、血管阻塞微型雨伞 (Umbrella) 等生物医疗领域 (图1)。相关成果以“Four-dimensional direct laser writing of reconfigurable compound micromachines”为题发表在材料领域国际顶级期刊《Materials Today》(Jin et al., Mater. Today, 2020, 32 (1-2): 19-25) 上。同时,该杂志也对该文进行了题为“Laser makes micromachines right”的专题新闻报道(https://www.materialstoday.com/polymers-soft-materials/news/laser-makes-micromachines-right/)。
智能结构设计与微纳米机器人研制
在智能结构设计方面,该团队提出了一套仿“乐高”结构的可编程模块化变体设计策略。通过微模块的自定义组装,可实现多种可编程的三维大变形结构。通过Denavit-Hartenberg (DH)参数分析和有限元仿真分析,还能对微模块组装结构的变形进行定量化分析和预测。利用该方法设计和制备出了微尺度变形金刚结构,并首次在微纳米尺度上实现了变形金刚“车形”到“人形”的快速可控切换。相关成果以“Four-dimensional micro-building blocks”为题发表在国际顶级期刊《Science Advances》(Huang et al., Sci. Adv., 2020, 6, eaav8219)上(图2)。另外,该研究工作被TechXplore专栏以题为“Four-dimensional micro-building blocks: Printable, time-related, programmable tools”新闻焦点评论4,指出“该研究团队提出一种基于四维微积木组装的模块化策略来辅助解决复杂四维打印的前向和逆向设计问题,并通过有限元分析方法预测每个微积木的形态演化过程,这为在微尺度下实现复杂可变形结构设计提供了可行方法。
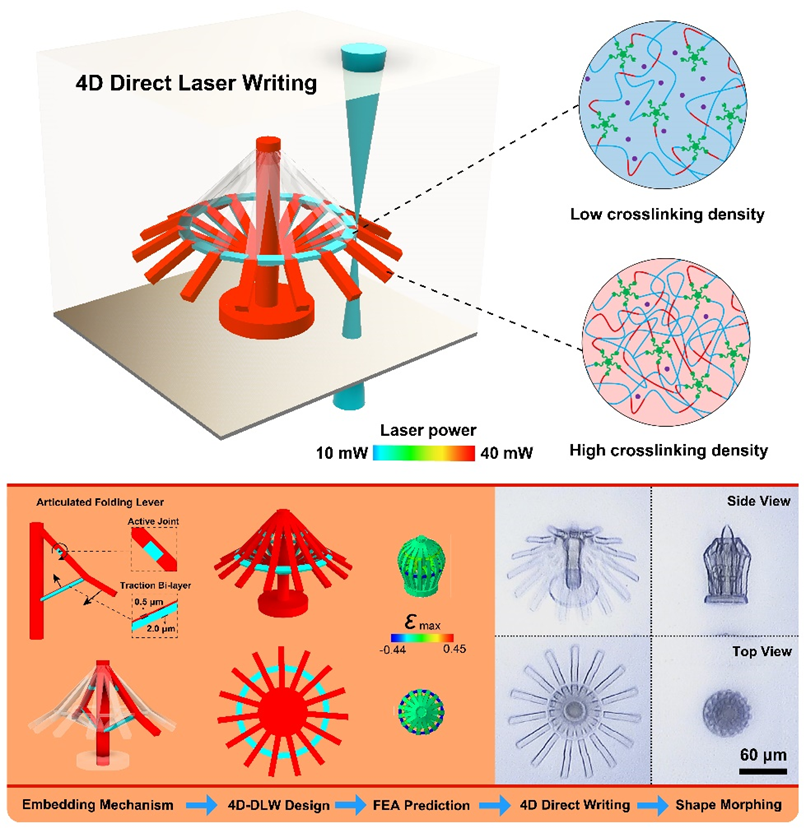
图1. 4D微纳打印技术流程
关节的结构设计和变形控制是实现机器人优异运动性能的关键。该团队基于智能材料的尺寸效应成功设计制备了智能微铰(Smart Microjoints)结构单元,并进一步研制了具有多个智能微铰结构的仿尺蠖柔性微爬行器结构,通过调控外界pH激励扩散的方向性以及智能微铰结构的响应变形特性,该微爬行器会与基底产生不对称的摩擦接触,并实现定向可编程爬行运动,运动性能优于绝大多数软体机器人。该工作实现了微铰链单元与微尺度柔性机器人结构的一体化设计集成,对微尺度柔性机器人的研究起到重要的借鉴意义。相关成果已被人工智能与机器人领域国际期刊《Advanced Intelligent Systems》发表(Chen et al., Adv. Intell. Syst., 2020, 1900128)。
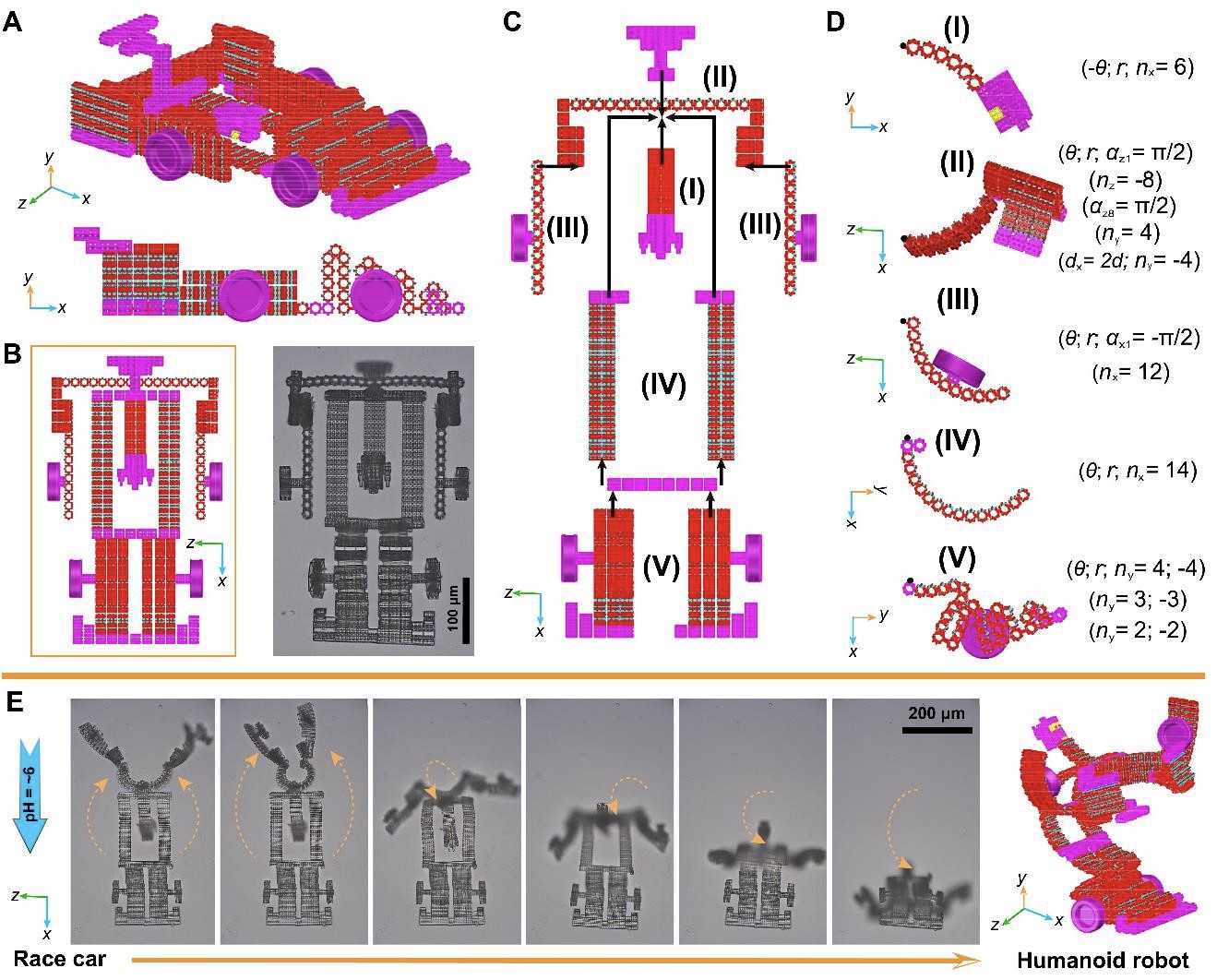
图2. 微纳变形金刚结构设计及变形过程
仿生功能表面设计与制备
基于以上自主研发的先进微纳米制造技术,该团队还在环境共融的仿生功能表面设计与制备方面取得重要进展。水下滑移功能表面具有十分优秀的流动减阻特性,在水下航行器减阻、流场控制、绿色船舶等领域具有良好的应用前景。在自然界中,很多水生动植物通过在其表面微结构上附着液气界面,维持水下呼吸和光合等生命过程的进行。“师法自然”,通过研究水生生物表面微结构与液气界面的相互作用机理,仿生设计和制造出水下稳定的固液气界面具有重要的科学意义和工程价值。
段慧玲教授团队通过研究具有极强环境适应能力的水生蕨类植物——槐叶萍,发现其表面特殊微结构具有极强的稳定液气界面能力;通过研究槐叶萍表面的微结构及其水下固液气界面力学特性,发现了一种新的水下固液气界面稳定性机理,这归因于其特殊的表面微结构。基于仿生学原理及力学设计理论,他们继而利用自主研发的先进微纳米制造技术制备了人工仿生槐叶萍表面,为固液气界面设计制造提供了新的设计准则和研究方法。该研究对固液气界面在水下,尤其是大水深、高压强等极端环境下的应用提供了新的设计思路(图3)。相关成果于2月4日以封面文章形式刊登在《Proceedings of the National Academy of Sciences of the United States of America》上,题为“Superrepellency of underwater hierarchical structures on Salvinia leaf”(Xiang, et al., Proc. Natl. Acad. Sci. U.S.A, 2020, 117 (5) 2282-2287)。
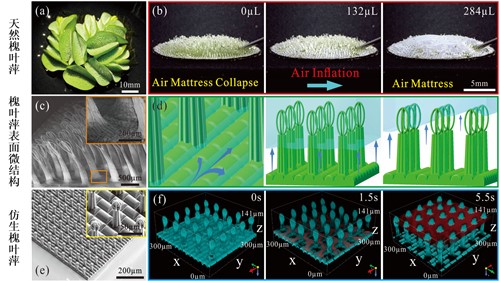
图3. (a), (b) 天然槐叶萍与槐叶萍表面附着的液气界面,(c), (d) 天然槐叶萍表面微观结构与液气界面稳定性机理,(e), (f) 仿生制造槐叶萍表面微观结构与液气界面
论文列表
1. Dongdong Jin†, Qianying Chen†, Tian-Yun Huang*, Jianyong Huang, Li Zhang, Huiling Duan. Four-dimensional Direct Laser Writing of Reconfigurable Compound Micromachines. Materials Today, 2020, 32 (1-2): 19-25.
https://www.materialstoday.com/polymers-soft-materials/news/laser-makes-micromachines-right/
2. Tian-Yun Huang†, Hen-Wei Huang†, Dongdong Jin†, Qianying Chen, Jianyong Huang, Li Zhang, Huiling Duan*. Four-dimensional Micro-building Blocks. Science Advances, 2020, 6, eaav8219.
https://techxplore.com/news/2020-01-four-dimensional-micro-building-blocks-printable-time-related.html
3. Qianying Chen, Pengyu Lv, Tian-Yun Huang, Jianyong Huang*, Huiling Duan*. Encoding Smart Micro-Joints for Micro-Crawlers with Enhanced Locomotion. Advanced Intelligent Systems, 2020, https://doi.org/10.1002/aisy.201900128.
4. Huang, T.Y., Huang, H.W., Jin, D.D., Chen, Q.Y., Huang, J.Y., Zhang, L., Duan, H. L.* (2020): Four-dimensional Micro-Building Blocks. Science Advances, 6 (3) 8219, DOI:10.1126/sciadv.aav8219.